Фетисов А.В. Планирование процесса съемки объектов искусственного происхождения геостационарной орбиты // Международный журнал социальных и гуманитарных наук. – 2016. – Т. 8. №1. – С. 88-90.
ПЛАНИРОВАНИЕ ПРОЦЕССА СЪЕМКИ ОБЪЕКТОВ ИСКУССТВЕННОГО ПРОИСХОЖДЕНИЯ ГЕОСТАЦИОНАРНОЙ ОРБИТЫ
А.В. Фетисов
Тамбовский государственный технический университет
(Россия, г. Тамбов)
Аннотация. Статья рассматривает процесс планирования управлением опорно-поворотным устройством оптического телескопа с точки зрения решения задачи оптимального поиска, критериями которой являются время съемки и количество захватываемых телескопом объектов. Рассмотрена актуальность поставленной задачи, критерии сформулированы математически, предложен вариант решения поставленной проблемы
Ключевые слова: система слежения, космический мусор, геостационарная орбита, оптический телескоп, опорно-поворотное устройство телескопа
Рассмотрим задачу планирования процесса телескопической фотосъемки объектов искусственного происхождения геостационарной орбиты Земли, играющую важную роль в функционировании систем слежения космического пространства. К таковым объектам, в частности, относятся и объекты космического мусора, съемка которых представляет особый интерес при расчете орбит спутников, исходя из прогнозирования столкновения объектов спутника и космического мусора. Фотосъемка проводится на оптических телескопах, поскольку расстояние до геостационарной орбиты довольно велико (ок. 36 000 км) для отсылки и получения отраженного от объекта радиосигнала, в таком случае, который будет требовать довольно большую мощность при его генерации, что исключает возможность использования аппаратов радио-слежения за геостационарной орбитой.
Положение спрогнозированных объектов орбиты отражается в небесных координатах (склонение–прямое восхождение) во времени с некоторым временным шагом, условно полагая, что картина съемки на некотором временном периоде будет статичной. На самом деле, за этот период объекты пройдут некоторое относительно-незначительное расстояние, на будущей фотографии отраженное некоторым треком, который позволит отличить объекты статичные относительно временных периодов и объекты динамичные – различить объекты космического мусора среди прочих объектов орбиты.
Стоит также отметить некоторые характеристики телескопа, влияющие на планирование и проведение процесса съемки: угол обзора, диаграмма захвата геостационарной орбиты телескопом, функции времени наведения опорно-поворотного устройства телескопа от угла наводки, времени выдержки снимка. В качестве внешних ограничений на планирование фотосъемки следует отнести общее время, выделенное на съемку всей области от общего пространства геостационарной орбиты, области засветки или тени в плоскости орбиты отраженные также в небесных координатах, съемка которых будет просто нецелесообразной.
Таким образом, возникает задача съемки области плоскости геостационарной орбиты оптимальной относительно времени и количества объектов входящих в кадр. По количеству объектов можно говорить о наборах площадок съемки имеющих более высокий приоритет в сравнении с наборами имеющими малую концентрацию объектов в своих площадках. Съемка наборов площадок меньшего приоритета ведется после съемки наборов высшего приоритета, следовательно, для получения как можно наибольшего количества снимков внутри выделенного статичного периода съемки, необходимо перемещать телескоп оптимально относительно значений функции наведения, характеризующей конкретный телескоп. Площадки съемки включаются вертикально, формируя наборы вдоль горизонтали. Съемка осуществляется проходом объектива телескопа по каждой такой площадке в вертикальном направлении в каждом из наборов по горизонтали. На рис. 1 приведен пример вертикального набора площадок, охватывающих пояс космического мусора за некоторый условный период времени ![]() .
.
|
|
|
Рис. 1. Вертикальное включение площадок съемки |
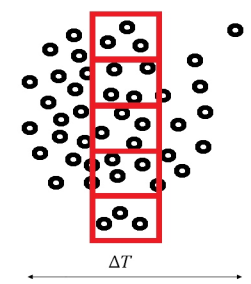
Таким образом, задача свелась к обозначению таких наборов площадок в плоскости орбиты, формированию очередности прохода объектива телескопа по намеченным площадкам.
Функция времени наведения опорно-поворотного устройства телескопа, в зависимости от угла наведения является нелинейной и имеет специфичный вид, что например, включение второй площадки (рис. 1) сразу после первой (наборы площадок берутся, как правило, вертикально) будет неоптимальным и, с точки зрения общего времени наведения, затратным, как например переход на третью площадку. В результате, задача планирования переходов между площадками формулируется таким образом, чтобы суммарное время наведения было минимальным. Это даст правильное планирование, уже с учетом времени выдержки снимка площадки, общего участка за статичный период, что и будет гарантировать включение в снимок как можно наибольшего количества объектов космического мусора за счет возможности рассмотрения большего количества.
Перейдем к решению поставленной задачи планирования. Обозначим функцию времени наведения как ![]() , тогда учитывая, что на съемку пояса объектов космического мусора требуется N вертикально включаемых площадок, общее время, требуемое на такую съемку будет:
, тогда учитывая, что на съемку пояса объектов космического мусора требуется N вертикально включаемых площадок, общее время, требуемое на такую съемку будет:
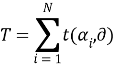 ,
,
де ![]() – координаты площадки в экваториальной системе в общем вертикальном наборе при фиксированной координате
– координаты площадки в экваториальной системе в общем вертикальном наборе при фиксированной координате ![]() .
.
Функция времени, отведенной на конкретную площадку представляет сумму времени наведения с площадки с координатами (![]() ) на площадку (
) на площадку (![]() и выдержки кадра
и выдержки кадра ![]() :
:
![]() =
=![]()
Таким образом, как и было обозначено выше, видна важность порядка организации переходов между площадками: организации набора координат ![]() таким образом, чтобы
таким образом, чтобы ![]() . Задача свелась к одной из задач комбинаторной оптимизации, подобной задачи коммивояжера, в отличие от которой, за критерий оптимального поиска принято общее время, а не общий путь. В качестве решения такой задачи в текущей работе был выбран метод ветвей и границ, поскольку количество площадок, определяемое от пояса траекторий объектов космического мусора и угла обзора телескопа, довольно значимо, чтобы говорить о методах случайного поиска или полного перебора.
. Задача свелась к одной из задач комбинаторной оптимизации, подобной задачи коммивояжера, в отличие от которой, за критерий оптимального поиска принято общее время, а не общий путь. В качестве решения такой задачи в текущей работе был выбран метод ветвей и границ, поскольку количество площадок, определяемое от пояса траекторий объектов космического мусора и угла обзора телескопа, довольно значимо, чтобы говорить о методах случайного поиска или полного перебора.
Для организации порядка переходов, обозначим матрицу переходов между площадками, как:
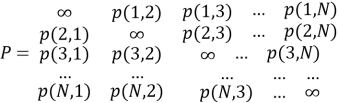
Величины ![]() отражают время перехода между i—ой и j—ой площадками в общем наборе площадок. Если говорить о вертикальном включении площадок съемки, то:
отражают время перехода между i—ой и j—ой площадками в общем наборе площадок. Если говорить о вертикальном включении площадок съемки, то:
![]()
Очевидно, что такая матрица будет симметричной, причем диагональные элементы искусственно приняты как бесконечность для избегания перехода с площадки на саму себя.
Оперируя матрицей P, решение задачи даст некий набор опорных координат площадок наведения телескопа в необходимом порядке, заранее гарантирующем оптимальное время съемки. Решая задачу аналогично и для выяснения порядка прохода уже между наборами вертикальных площадок, результирующий набор опорных координат даст порядок съемки части области небесной плоскости за некоторый условно-статичный промежуток времени.
Проводя решения для каждого временного периода и соответствующего участка плоскости съемки, результирующие координаты могут быть интерпретированы, как например, в управляющую программу телескопа, что, при автоматизации и программирования процесса принятия решения описанным выше образом, автоматизирует процесс программирования телескопа в целом. При организации сети телескопов и распределении времени и участков геостационарной орбиты можно говорить о функционировании системы слежения за орбитой, принимая соответствующие решения по управлению каждым телескопом отдельно.
Библиографический список
1. Назаренко А.И. Моделирование космического мусора. – М., 2013.
2. Дроздов Н.Д. Алгоритмы дискретного программирования. – Тверь, 2000.
3. Жаров В.Е. Сферическая астрономия. – М., 2002.
4. Теребиж В.Ю. Современные оптические телескопы. – М., 2005.
PLANNING OF PROCESS OF SHOOTING OF OBJECTS OF ARTIFICIAL ORIGIN OF THE GEOSTATIONARY ORBIT
A.V. Fetisov
Tambov state technical university
(Russia, Tambov)
Abstract. The article examines the planning process management support-rotating device of the optical telescope from the point of view of the decision of the optimal search criteria which are the time of capture and number captured by the telescope objects. Considers the relevance of the task, criteria are formulated mathematically, the proposed solution to this problem
Keywords: tracking system, space debris, geostationary orbit, optical telescope, support-rotating device of telescope.